
Using PyTorch implementation of UNet for road extraction
Using PyTorch implementation of UNet for road extraction
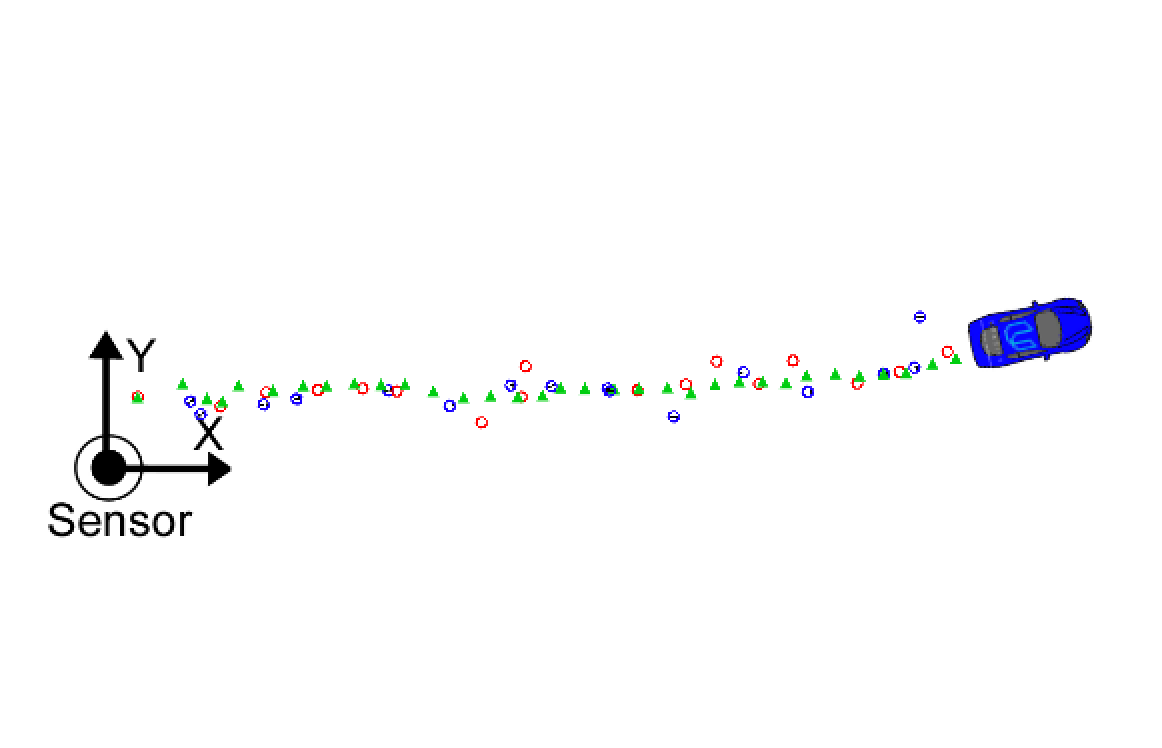
Using C++ to implement an extended and unscented kalman filter for object tracking

Computer vision and machine learning for vehicle identification and tracking

Cloning driving behavior with convolutional neural networks
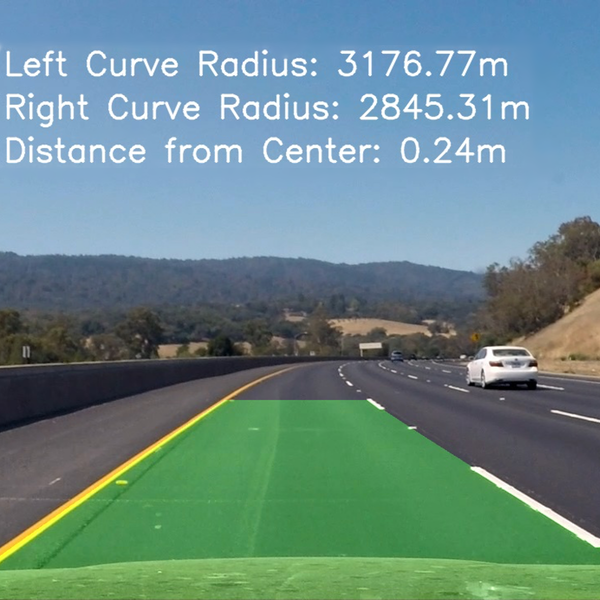
Using computer vision techniques to refine the identification of lane lines in both images and video feeds

Classifying traffic signs with convolutional neural networks (LeNet architecture)

Color selection, region masking, canny edge detection, and hough transformation to find lane lines
Using computer vision techniques to visually filter and search through images
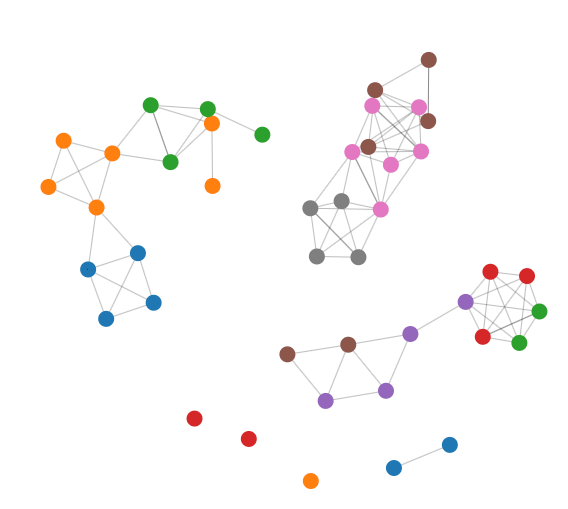
Natural language processing, latent semantic indexing, latent dirichlet allocation, and D3.js visualizations!
Getting data out of a remote server and show results on a D3 dashboard